Our patented RTR torque matching technique (United States Patent and Trademark Office | Patent for Torque Matching) uses a novel approach for replicating and emulating real-world conditions in the laboratory.
Torque matching doesn’t require coast down, road gradient, wind tunnel, tire resistance, or direct axle torque measurement because it relies on the principle of matching the inputs and conditions of a road test and a laboratory test. A vehicle’s tractive effort during a road test equals the dyno’s resistive torque during a replication laboratory cycle.
This page details Torque Matching approach. How it works, use cases, and benefits for vehicle, system, and component developers.
Vehicle development has become more challenging. There are several reasons for this: new and more complex vehicles features, tightening regulations, new powertrain technologies, supply chain issues, and a battle for talent. Delivering a vehicle for the start of production remains a tough task and is expected to become even harder.
Key vehicle development challenges
New and more complex vehicle features
Safety and convenience features are increasing both in quantity and complexity. An example of this trend is brake-to-steer. In this case, a vehicle’s hardware – brake system, control units, sensors, and actuators – are essentially unchanged. Yet, a new feature is derived via software alone and layered on top. This is an example of how software is exponentially increasing vehicle development complexity.
End users demand safer vehicles and want features which add-value to their lives. Vehicle developers, however, are challenged with absorbing these new features into their already challenging development schedules.
Increased software complexity
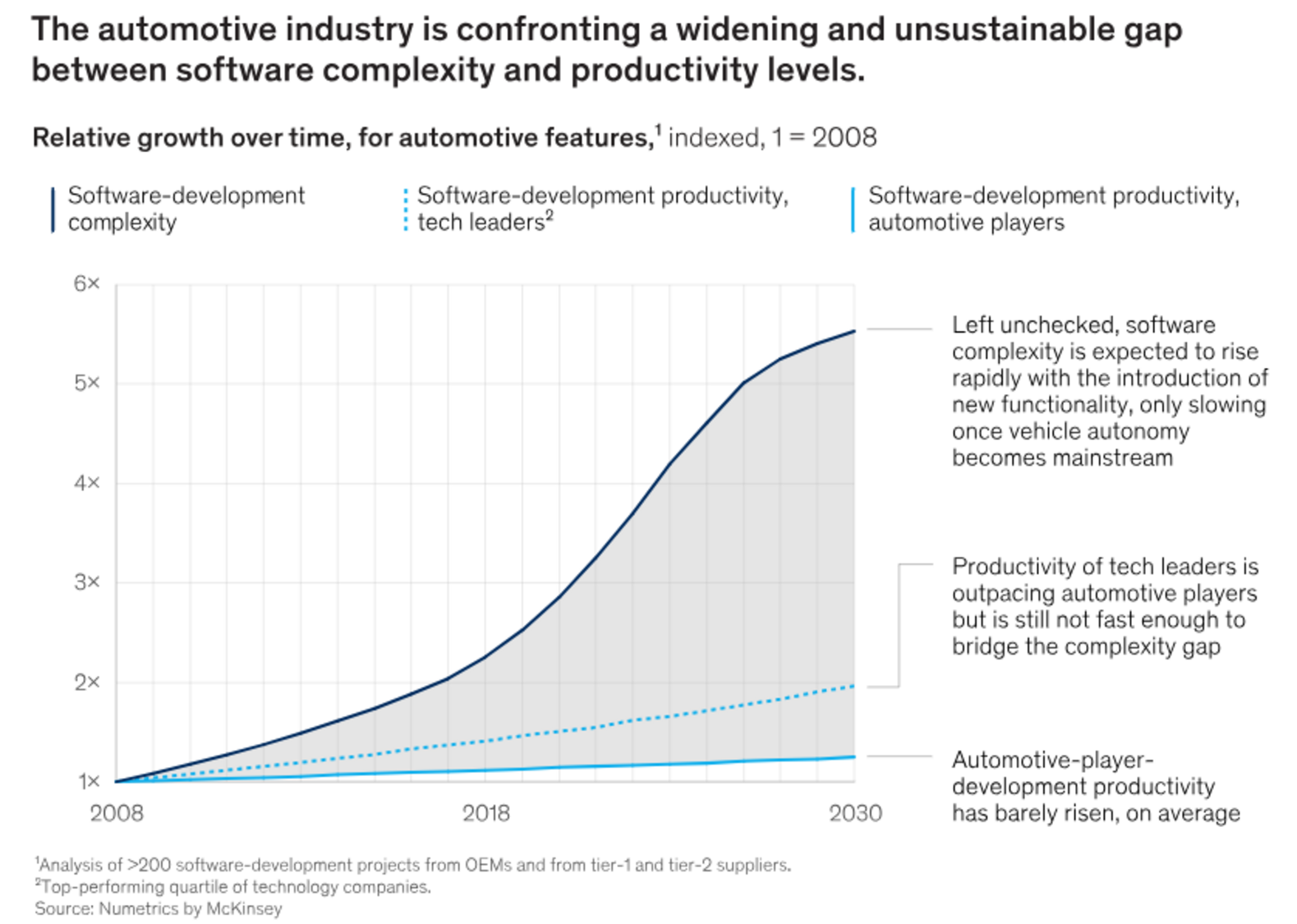 Software verification and validation looks likely to dominate R&D resources in the future. McKinsey published several studies into the rapidly increasing complexity of vehicle software. They suggest that if the automotive industry doesn’t change its development approach, OEMs and suppliers will find it difficult to develop and launch vehicles profitably and on time. This rapid increase in the use of software, combined with the flexibility offered by electric vehicle platforms, is giving rise to another development trend referred to as the “software-defined vehicle”. This trend suggests that there will be a decoupling between vehicle software development and the mechanical systems which underpin a vehicle in much the same way as has happened in the mobile phone industry.
Software verification and validation looks likely to dominate R&D resources in the future. McKinsey published several studies into the rapidly increasing complexity of vehicle software. They suggest that if the automotive industry doesn’t change its development approach, OEMs and suppliers will find it difficult to develop and launch vehicles profitably and on time. This rapid increase in the use of software, combined with the flexibility offered by electric vehicle platforms, is giving rise to another development trend referred to as the “software-defined vehicle”. This trend suggests that there will be a decoupling between vehicle software development and the mechanical systems which underpin a vehicle in much the same way as has happened in the mobile phone industry.
McKinsey & Company: The case for an end-to-end automotive-software platform
Tightening regulations
In addition to features demanded by customers, more stringent regulations have increased compliance requirements. New, more onerous regulations have created a perfect storm that has severely delay new product introduction.
Real scenarios not laboratory cycles
Developing vehicles that meet safety, performance and customer demands is tough. But, achieving those objectives over real-driving conditions is an even bigger challenge. In theory, this results in an infinite number of different test conditions. Vehicles must now be developed with real scenarios, not just laboratory cycles. The breadth of scenarios that need to be tested increases each year as new situations come to light, requiring vehicle manufacturers and automotive suppliers to be more productive with the same or fewer resources.
Given these challenges, how can you be sure that your product will meet regulations and customer expectations under any driving condition, in any weather, and using the local fuel for the whole life of a vehicle—and how can this be achieved within an economically viable cost and timeframe?
One way to combat the increase in workload is to change the way systems and vehicles get verified, validated, and signed-off. Smarter development methods are needed.
Road-to-Rig as part of a smarter solution
R2R offers the potential to reduce costs and accelerate vehicle development. It’s possible to reliably reproduce real-world driving conditions in the laboratory with a high level of precision. This can limit the need for altitude or hot and cold test trips because the results in the lab can be trusted. It could also reduce the number of prototypes per program.
A traditional approach to lab-based replication and emulation is using road load replication (RLS).
Our torque matching, part of Intelligent Lab solution suite, removes the need for extensive preparatory testing and allows for vehicles of a similar size and weight to be tested concurrently. A single recorded road test can be used to replicate and emulate real-world testing in a laboratory with multiple test plans, model variants, and design specifications.
Torque matching can work especially well for system development, calibration, or quality investigations due to its high level of correlation to the real world. A vehicle development engineer can be assured that while running through a test plan, the same result will be seen on the road.
Road-to-Rig use cases
What is Road-to-Rig?
R2R is the ability to accurately replicate a real-world road test of a vehicle and its environment in a test laboratory. The purpose is to enable development teams to robustly repeat real-world testing with laboratory precision. Driving conditions, driver aggressivity, and vehicle systems and components can all be changed. The corresponding impact on electric range, emissions, and performance can be observed.
Electric range, emissions, or performance can be compared to a road test with laboratory level precision. Torque matching has a superior accuracy when compared to traditional road-load simulation (RLS) determined by a superior coefficient of determination (R2*).
Torque Matching is a method of replicating a real-world driving test within the laboratory environment. It reliably replicates the loads experienced by the vehicle during the test. It can do this without the need to record difficult to measure items during a road test:
The patented torque matching technique uses a novel testing approach for replicating and then simulating (emulating) different real-world conditions in the laboratory.
Three stages to the process with an optional fourth stage to switch to a different vehicle.
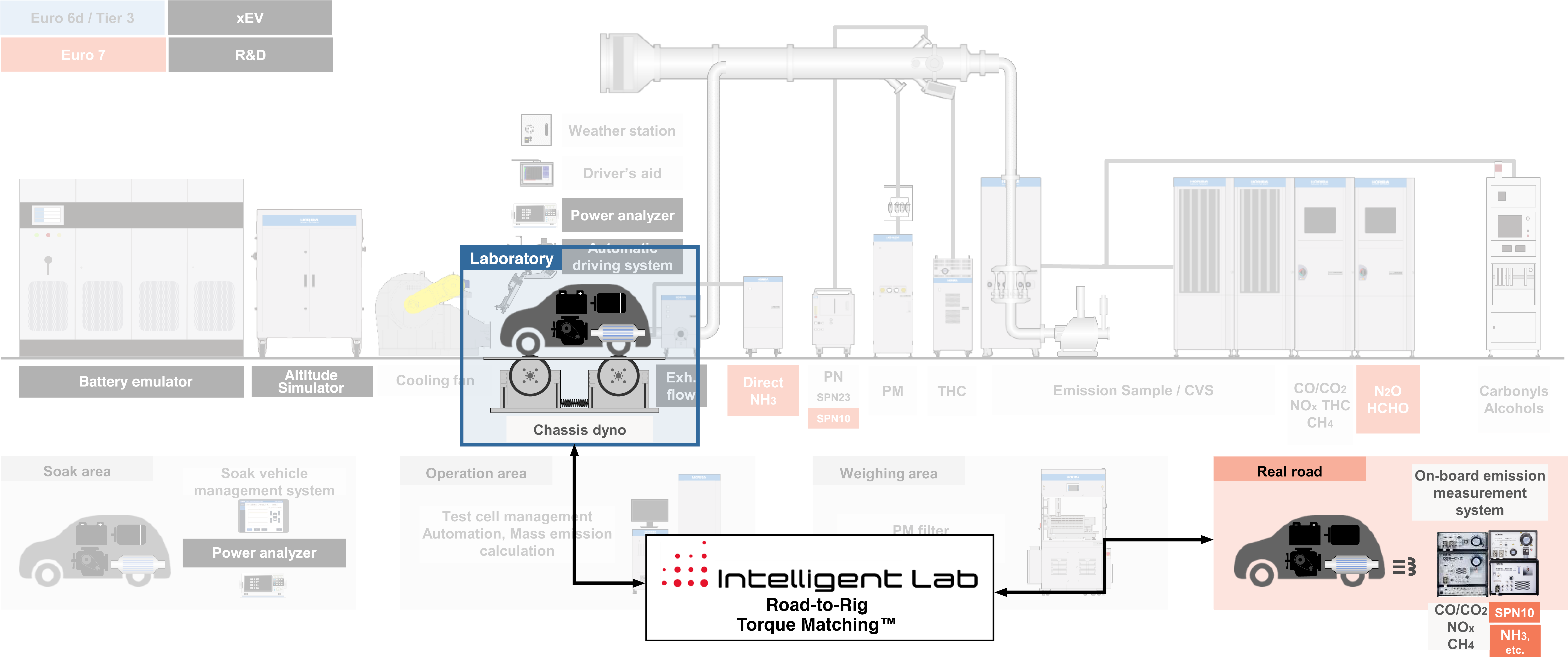
Figure 1: An illustration of our Torque Matching dyno replication method.
Figure 1 shows the stages of the Torque Matching approach.
In essence, the torque a vehicle delivers during an on-road test drive is perfectly mirrored on the dyno. This simple approach accounts for wind resistance and rolling resistance, including cornering and gradient.
Stage 1: Record the test drive
Perform any kind of road test irrespective of powertrain type. For example, record a BEV or an IC-based vehicle over a predefined test route and measure the inputs mentioned below and the outputs of interest such as battery voltage or emissions. The data that needs to be logged is vehicle dependent, but generally these are minimum requirements.
Vehicle inputs
During the test drive, the vehicle’s throttle, brake and gear positions are recorded as well as the vehicle speed and ambient weather conditions. These are the only variables needed for our Torque Matching approach.
Environmental inputs
Vehicle outputs
Measure the outputs under investigation such as battery state of charge, emissions, or performance.
If RDE development work is required prepare the vehicle for RDE testing and drive the RDE test route. Record the RDE data as normal along with the vehicle inputs for use in stage 2.
The data collected is used to establish a reference for replication in the chassis dyno laboratory in the next stage.
Stage 2: Replicate the road test in the laboratory using torque matching
The replication stage is a validation test of the vehicle in the laboratory under the same conditions as during a road test.
A chassis dyno-based test requires:

In Figure 2 the loads experienced by a vehicle during a test drive are illustrated. During the replication phase the road loads are almost perfectly matched due to the fact the vehicle is being operated in exactly the same way as during the test drive.
The vehicle speed is played back using the chassis dynamometer running in a speed control mode (ASR). In the same instance, the pedal inputs and gear changes are played back, or synchronized, via a robot driving system installed into the vehicle.
The net result is that the speed controlling action of the chassis dyno balances the resistive force of the dyno with that of the tractive effort of the vehicle to achieve the target vehicle speed. The resisting action (force) provided by the dyno is therefore equal to the real-world road load.
The result of this approach is a highly accurate representation of the load the vehicle experienced during the test drive. This resistive force is recorded as a dyno load and added to the test data so it can be used as a target input to emulate the real-world (see next stage).
The dyno’s new torque load profile is now a highly accurate representation of all the resistive loads that the vehicle experienced during the original test drive. Cornering, wind gusts, gradients, and rolling resistances are accounted for. It is a near perfect replication.
This quick and easy torque matching approach has several benefits. The main one being the elimination of the need to measure or estimate the gradient or vehicle road-loads. No vehicle information is necessary such as coast-down rolling resistance.
The end result is a highly accurate replication of the road load that the vehicle experienced on the test drive. By extension, the ECU is stimulated in exactly the same way as during the test drive, thereby creating a highly accurate replication in the lab. This dyno torque is added to the test file to be used in the emulation stage.
The end result is a highly accurate replication of the road load that the vehicle experienced on the test drive. By extension, the ECU is stimulated  in exactly the same way as during the test drive, thereby creating a highly accurate replication in the lab. This dyno torque is added to the test file to be used in the emulation stage.
in exactly the same way as during the test drive, thereby creating a highly accurate replication in the lab. This dyno torque is added to the test file to be used in the emulation stage.
In Figure 3 a vehicle is driven on a chassis dyno using a robot driver to control the throttle, brake, and gear positions. The dyno controller is made to follow the speed trace exactly by changing the dyno torque. The torque trace is then recorded as a function of time so it can be used in the next stage, emulation.
Stage 3: Emulation with the original vehicle
Now that the replication test file has an accurate representation of the road loads, we can use any sensible road load simulation (RLS) coefficients of A, B, C and mass to derive a gradient channel. Contrary to the RLS method, the vehicle coefficients can be anything within reason. As an example, approximate coast down coefficients could be generic items, chosen from a table of running resistances (cookbook) or generated from a formula/calculator.
HORIBA Torque Matching method doesn’t need to measure coefficients related to the resistive forces. This leads to a much higher replication accuracy.
The R2R Torque Matching software will take the speed trace and calculate a theoretical road load using the RLS model (A, B, C + Mass, input by the user). This is subtracted from the measured road load captured in the replication stage (stage 2 above). The difference between the theoretical and real road load is then captured and bound as a gradient input profile.
In essence, the gradient term acts like a “make up” to capture the difference between the model and the real world. So, if light A, B, C terms are picked, the gradient values will be larger than if you picked heavy terms.
The key is to use the same terms on the dyno automation system as used for the calculation. To be clear, this means performing a coast down match on the chassis dyno using the same vehicle coefficients as the coast down target.
The net effect of driving the same vehicle speed trace, with the same A, B, C terms used in the calculation plus the calculated gradient values, is that the same road load is experienced by the vehicle as on the road test.
 A key difference in the emulation stage is that the vehicle control is returned to the driver robot. It must now use closed-loop control of the pedals and gears to achieve the target speed rather than have the chassis dyno adapt to achieve the target speed.
A key difference in the emulation stage is that the vehicle control is returned to the driver robot. It must now use closed-loop control of the pedals and gears to achieve the target speed rather than have the chassis dyno adapt to achieve the target speed.
The benefit of this is that it is now possible to change vehicle attributes and still drive over the same ‘load profile’. The result is robust and repeatable emulation of the real-world.
Development, quality, and conformity of production teams can be confident that the test lab will accurately predict real-world results for any given changes to calibrations, components, or driving styles.
A key difference in the emulation stage is that the vehicle control is returned to the driver robot. It must now use closed-loop control of the pedals and gears to achieve the target speed rather than have the chassis dyno adapt to achieve the target speed.
The benefit of this is that it is now possible to change vehicle attributes and still drive over the same ‘load profile’. The result is robust and repeatable emulation of the real-world.
Development, quality, and conformity of production teams can be confident that the test lab will accurately predict real-world results for any given changes to calibrations, components, or driving styles.
Stage 4: Emulation with a different vehicle
Another benefit of our Torque Matching approach is the ability to swap vehicles and re-use the same test data and settings. The matched torque allows for any similar sized vehicle to use the recorded results and still produce highly accurate results.
This makes it easy and convenient to replace the original vehicle with a similar model without having to baseline the new vehicle.
Most modern dynamometers and their automation systems can run a vehicle or system in a road load simulation (RLS) mode. This is common practice. However, the accuracy is not as good as it could be due to several reasons.
First, the RLS equation is an oversimplification of the real dynamics governing a vehicle’s motion. Second, the way of deriving the coefficients have inaccuracies themselves such as coast-down measurements. Finally, the system response adds to the inaccuracy since the throttle and brake positions aren’t perfectly replicated.
It also requires significant resources and time to generate the necessary RLS coefficients. Access to vehicles, labor, and test facilities are needed for each vehicle model.
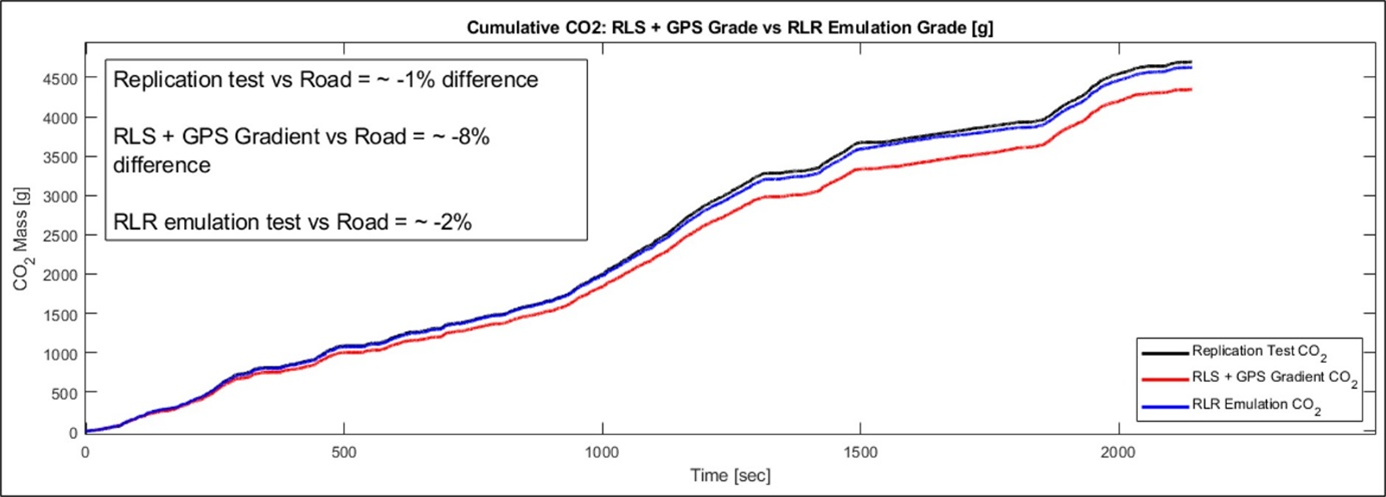
The results in the figure below show the Torque Matching method, sometimes referred to as road load replication (RLR), has a much greater level of accuracy. This is fundamentally because the vehicle under test is being stimulated in exactly the same manner as it was during the original test drive. The superior accuracy and simplicity of HORIBA Torque Matching method can be applied to BEVs too.
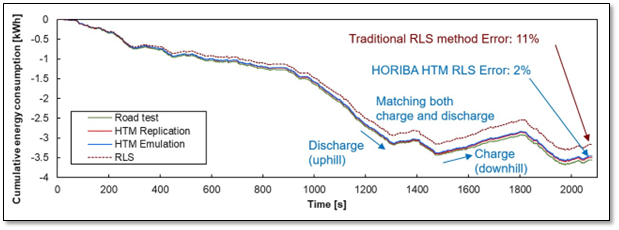
BEV energy consumption prediction
The same is true when replicating a BEV on the chassis dyno. HORIBA’s Torque Matching method provides a much more accurate replication of the energy consumption. Below is a chart comparing the replication of cumulative energy consumption of an EV using both traditional RLS and HORIBA’s Torque Matching RLS (RLR) method.
The table shows comparison data between the Torque Matching methodology (RLR) and traditional road load simulation (RLS).
Note, all these results were produced using the same vehicle and with an ADS-EVO driver robot controlling the vehicle inputs.
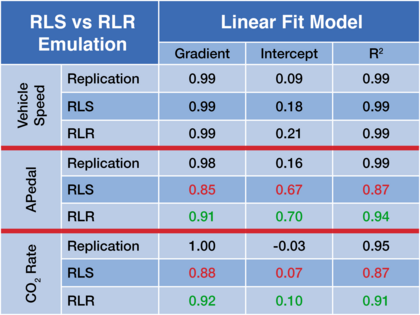
In this table:
The results show that our Torque Matching method, here identified as RLR, produces a much more accurate replication of vehicle speed, accelerator pedal, and CO2 when compared with a traditional RLS approach. Comparisons of other emissions can also be provided on request.
Chassis dynos are becoming a key development asset
The Chassis Dyno is on the verge of becoming one of the most important tools in an OEM or supplier’s toolkit. The VULCAN Evo, equipped with the latest automation technology like STARS, can dramatically cut down the effort and resources required to sign off vehicles by employing smarter development techniques.
Full unattended chassis dyno testing
Combining a chassis dyno with advanced automation and safety system, a driver robot, an environmental replication system such as MEDAS, and torque matching can enable 24/7 unattended operation for weeks or even months. EVs can be automatically recharged, force cooled, heated as well as ECU re-flashing after every test. This extensive level of automation opens up new test and development possibilities.
Vehicle-in-the-loop
An advanced Chassis test cell can run vehicle-in-the-loop and verify and validate early features straight from the simulation world. This close coupling to simulation makes the chassis lab an extension of the virtual world. As an example, ADAS features can be tested through a vast array of situations before a vehicle is let loose on the road. We have a CAV sensor testing tool set which adds on to an existing chassis test cell.
Our R2R solution has been designed to be easy to implement in existing test laboratories. The torque matching replication and emulation capabilities are enabled via software called Data Builder, Test Builder, and Chart Builder. These software tools format the data and convert it so that a test automation system can read it and execute the tests. They are available as software applications that run in the STARS Enterprise environment either in the cloud or on a local pc.
The solution can work with non-HORIBA automation systems, dynamometers and driver robots.
Equipment and software required:
Efficient use of test resources leading to cost and operational benefits
Advantages for emissions development
Reduced requirement for in-field environmental testing
Reduced need for pre-test measurements for RLS coefficients
No need to derive a vehicle’s coefficients beforehand using measurements such as rolling resistance, aerodynamic drag, or axel torque. There is also no need to spend time determining the road grade, either via measurement or approximation.
This presents a tremendous saving for OEMs and suppliers. Additional measuring like those mentioned above can take huge amounts of resources and time. As we will explain later, HORIBA’s Torque Matching approach provides enhanced accuracy due to the elimination of the measurement tolerances.
Faster test cell benchmarking
Use one golden vehicle and the higher accuracy of torque matching to check that dynamometer test labs are aligned and within acceptable tolerances.
Efficient vehicle systems development
Investigate design changes quickly such as:
Environmental effects can be explored quickly and repeatably
Altitude or temperature can be changed to highlight issues and validate fixes.
Powertrain, chassis, and assistance systems can be optimized in the knowledge that the vehicle is being loaded in an identical manner to on the road.
Simulate virtual test drives using vehicle-in-the-loop and torque matching
Import real gradient to virtual test route (e.g.via a software like IPG CarMaker vehicle simulation) for simulation and vehicle-in-loop testing.
Road-to-rig is an increasingly popular development method to bring real-world testing into the laboratory. Our patented torque matching method is a simple, yet highly accurate technique which can be implemented in existing test facilities. It has a higher replication performance than the traditional RLS method yet requires less upfront measurements to be done to create the road load simulation coefficients.
FilI out the form below to schedule a demo of torque matching.


Do you have any questions or requests? Use this form to contact our specialists.