Nossa técnica patenteada de correspondência de torque RTR (Escritório de Patentes e Marcas Registradas dos Estados Unidos | Patente para Correspondência de Torque) utiliza uma abordagem inovadora para replicar e emular condições do mundo real em laboratório.
A correspondência de torque não exige desaceleração, inclinação da estrada, túnel de vento, resistência dos pneus ou medição direta do torque no eixo, pois se baseia no princípio de igualar as entradas e condições de um teste em estrada e um teste em laboratório. O esforço de tração de um veículo durante um teste em estrada é igual ao torque resistivo do dinamômetro durante um ciclo de replicação em laboratório.
Esta página detalha a abordagem de Correspondência de Torque. Como funciona, casos de uso e benefícios para desenvolvedores de veículos, sistemas e componentes.
O desenvolvimento de veículos tornou-se mais desafiador. Há vários motivos para isso: novas características mais complexas nos veículos, regulamentações mais rigorosas, novas tecnologias de propulsão, problemas na cadeia de suprimentos e a disputa por talentos. Entregar um veículo pronto para o início da produção continua sendo uma tarefa árdua e a tendência é que se torne ainda mais difícil.
Principais desafios no desenvolvimento de veículos
Características novas e mais complexas do veículo
Os recursos de segurança e conveniência estão aumentando tanto em quantidade quanto em complexidade. Um exemplo dessa tendência é o esterçamento via frenagem. Nesse caso, o hardware do veículo – sistema de freios, unidades de controle, sensores e atuadores – permanece essencialmente inalterado. No entanto, um novo recurso é derivado exclusivamente por software e implementado em camadas. Este é um exemplo de como o software está aumentando exponencialmente a complexidade do desenvolvimento veicular.
Os usuários finais exigem veículos mais seguros e desejam recursos que agreguem valor às suas vidas. Os desenvolvedores de veículos, no entanto, enfrentam o desafio de incorporar esses novos recursos em seus cronogramas de desenvolvimento já bastante apertados.
Aumento da complexidade do software
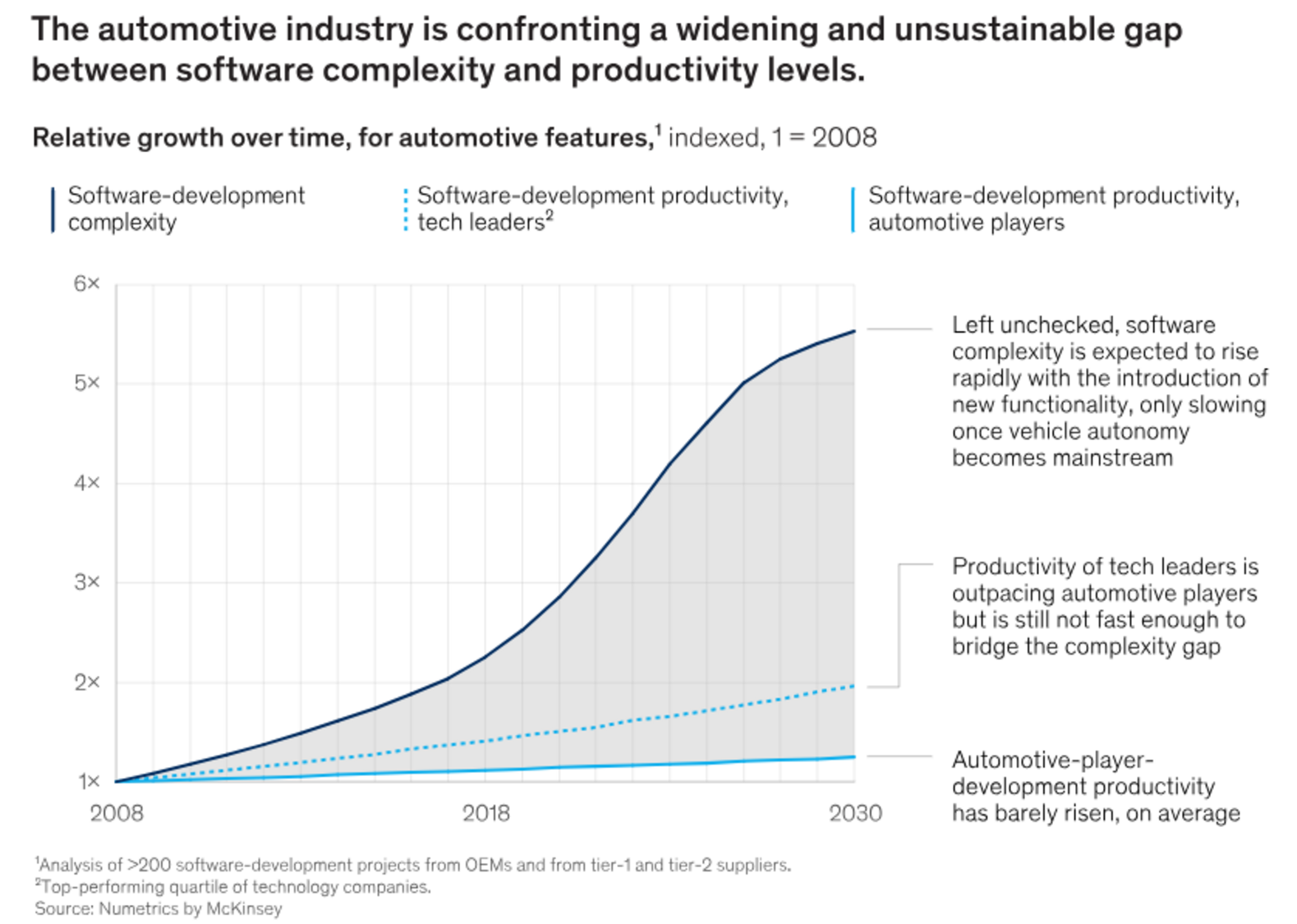 A verificação e validação de software provavelmente dominarão os recursos de P&D no futuro. A McKinsey publicou diversos estudos sobre a crescente complexidade do software veicular. Esses estudos sugerem que, se a indústria automotiva não mudar sua abordagem de desenvolvimento, as montadoras e fornecedores terão dificuldades para desenvolver e lançar veículos de forma lucrativa e dentro do prazo. Esse rápido aumento no uso de software, combinado com a flexibilidade oferecida pelas plataformas de veículos elétricos, está dando origem a outra tendência de desenvolvimento conhecida como "veículo definido por software". Essa tendência sugere que haverá uma separação entre o desenvolvimento de software veicular e os sistemas mecânicos que sustentam um veículo, de forma semelhante ao que ocorreu na indústria de telefonia móvel.
A verificação e validação de software provavelmente dominarão os recursos de P&D no futuro. A McKinsey publicou diversos estudos sobre a crescente complexidade do software veicular. Esses estudos sugerem que, se a indústria automotiva não mudar sua abordagem de desenvolvimento, as montadoras e fornecedores terão dificuldades para desenvolver e lançar veículos de forma lucrativa e dentro do prazo. Esse rápido aumento no uso de software, combinado com a flexibilidade oferecida pelas plataformas de veículos elétricos, está dando origem a outra tendência de desenvolvimento conhecida como "veículo definido por software". Essa tendência sugere que haverá uma separação entre o desenvolvimento de software veicular e os sistemas mecânicos que sustentam um veículo, de forma semelhante ao que ocorreu na indústria de telefonia móvel.
McKinsey & Company: A necessidade de uma plataforma de software automotivo completa
Regulamentação mais rigorosa
Além das funcionalidades exigidas pelos clientes, regulamentações mais rigorosas aumentaram os requisitos de conformidade. Essas novas regulamentações, mais onerosas, criaram a tempestade perfeita que atrasou severamente o lançamento de novos produtos.
Cenários reais, não ciclos de laboratório.
Desenvolver veículos que atendam às exigências de segurança, desempenho e do cliente é difícil. Mas alcançar esses objetivos em condições reais de direção é um desafio ainda maior. Em teoria, isso resulta em um número infinito de condições de teste diferentes. Os veículos agora precisam ser desenvolvidos com cenários reais, não apenas em ciclos de laboratório. A variedade de cenários que precisam ser testados aumenta a cada ano à medida que novas situações surgem, exigindo que fabricantes de veículos e fornecedores automotivos sejam mais produtivos com os mesmos recursos ou até menos.
Diante desses desafios, como garantir que seu produto atenda às regulamentações e às expectativas do cliente em quaisquer condições de direção, em qualquer clima e utilizando o combustível local durante toda a vida útil do veículo — e como isso pode ser alcançado dentro de um custo e prazo economicamente viáveis?
Uma forma de combater o aumento da carga de trabalho é mudar a maneira como os sistemas e veículos são verificados, validados e aprovados. Métodos de desenvolvimento mais inteligentes são necessários.
Do transporte rodoviário à plataforma como parte de uma solução mais inteligente.
A tecnologia R2R oferece o potencial de reduzir custos e acelerar o desenvolvimento de veículos. É possível reproduzir com confiabilidade as condições reais de condução em laboratório com um alto nível de precisão. Isso pode limitar a necessidade de viagens de teste em altitude ou em temperaturas extremas, pois os resultados em laboratório são confiáveis. Também pode reduzir o número de protótipos por programa.
Uma abordagem tradicional para replicação e emulação em laboratório é o uso da replicação de carga rodoviária (RLS, na sigla em inglês).
Nosso recurso de correspondência de torque, parte do pacote de soluções Intelligent Lab, elimina a necessidade de extensos testes preparatórios e permite que veículos de tamanho e peso semelhantes sejam testados simultaneamente. Um único teste de estrada gravado pode ser usado para replicar e simular testes em condições reais de laboratório com múltiplos planos de teste, variantes de modelo e especificações de projeto.
A correspondência de torque pode ser especialmente útil para o desenvolvimento de sistemas, calibração ou investigações de qualidade devido ao seu alto nível de correlação com o mundo real. Um engenheiro de desenvolvimento de veículos pode ter certeza de que, ao executar um plano de testes, o mesmo resultado será observado na estrada.
Casos de transporte rodoviário até a plataforma
O que é Road-to-Rig?
R2R (Road-to-Road) é a capacidade de replicar com precisão um teste de estrada real de um veículo e seu ambiente em um laboratório de testes. O objetivo é permitir que as equipes de desenvolvimento repitam testes em condições reais com a mesma precisão de um laboratório. As condições de direção, a agressividade do motorista e os sistemas e componentes do veículo podem ser alterados. O impacto correspondente na autonomia elétrica, nas emissões e no desempenho pode ser observado.
A autonomia elétrica, as emissões ou o desempenho podem ser comparados a um teste de estrada com precisão de nível laboratorial. A correspondência de torque tem uma precisão superior quando comparada à simulação tradicional de carga na estrada (RLS), determinada por um coeficiente de determinação superior (R2*).
O Torque Matching é um método para replicar um teste de condução real em ambiente laboratorial. Ele reproduz com precisão as cargas experimentadas pelo veículo durante o teste, sem a necessidade de registrar itens difíceis de medir durante um teste em estrada.
A técnica patenteada de correspondência de torque utiliza uma abordagem de teste inovadora para replicar e, em seguida, simular (emular) diferentes condições do mundo real em laboratório.
O processo é composto por três etapas, com uma quarta etapa opcional para a troca por um veículo diferente.
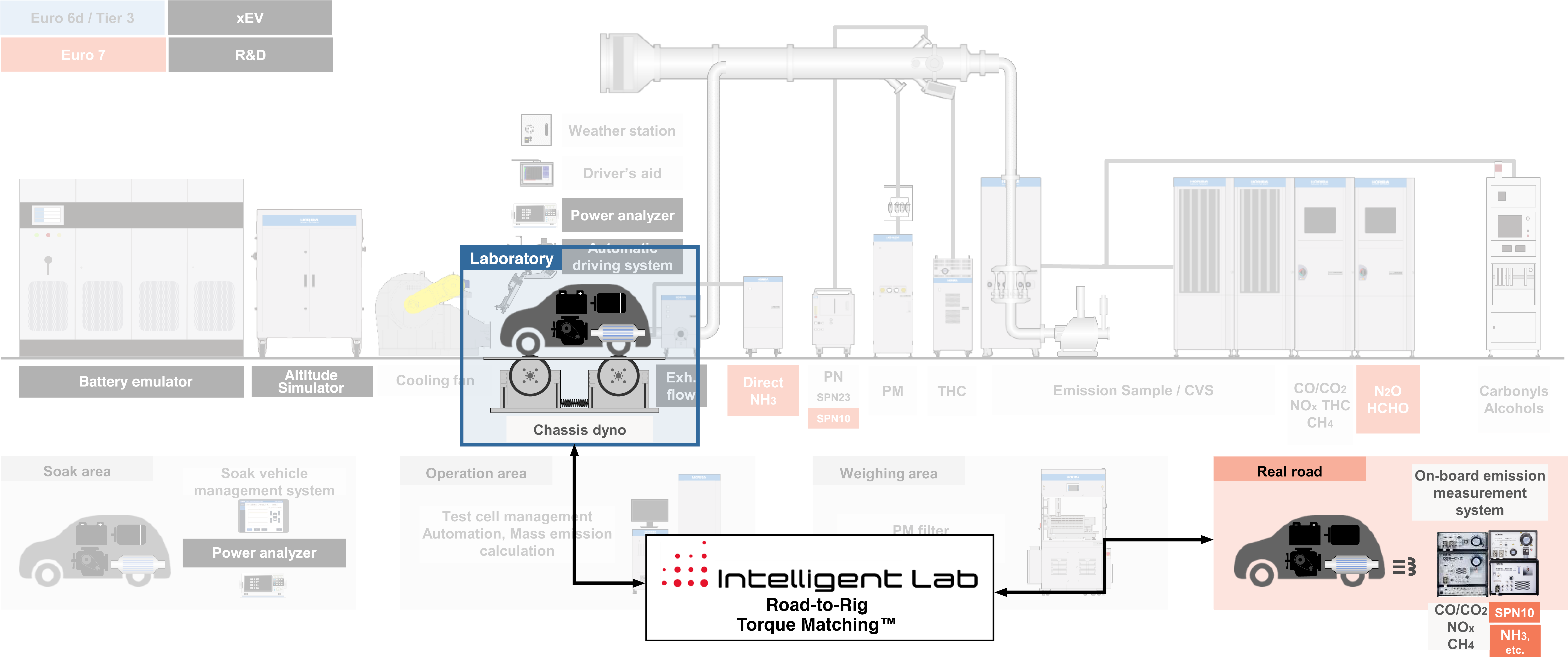
Figura 1: Ilustração do nosso método de replicação em dinamômetro de correspondência de torque.
A Figura 1 mostra as etapas da abordagem de Correspondência de Torque.
Em essência, o torque que um veículo entrega durante um teste de condução em estrada é perfeitamente reproduzido no dinamômetro. Essa abordagem simples leva em consideração a resistência do ar e a resistência ao rolamento, incluindo curvas e inclinações.
Etapa 1: Grave o teste de condução
Realize qualquer tipo de teste de estrada, independentemente do tipo de motorização. Por exemplo, registre um veículo elétrico a bateria (BEV) ou um veículo com motor de combustão interna (ICE) em uma rota de teste predefinida e meça as entradas mencionadas abaixo e as saídas de interesse, como a voltagem da bateria ou as emissões. Os dados que precisam ser registrados dependem do veículo, mas, em geral, estes são os requisitos mínimos.
Entradas do veículo
Durante o teste de condução, as posições do acelerador, do freio e da marcha do veículo são registradas, assim como a velocidade do veículo e as condições climáticas do ambiente. Essas são as únicas variáveis necessárias para nossa abordagem de Sincronização de Torque.
Insumos ambientais
Saídas do veículo
Meça os resultados em análise, como o estado de carga da bateria, as emissões ou o desempenho.
Caso seja necessário desenvolver o sistema RDE, prepare o veículo para os testes e percorra o trajeto. Registre os dados do RDE normalmente, juntamente com as informações de entrada do veículo, para uso na etapa 2.
Os dados coletados são usados para estabelecer uma referência para replicação no laboratório de dinamômetro de chassis na próxima etapa.
Etapa 2: Replicar o teste de estrada em laboratório usando a correspondência de torque.
A etapa de replicação é um teste de validação do veículo em laboratório, sob as mesmas condições de um teste em estrada.
Um teste baseado em dinamômetro de chassis requer:

Na Figura 2, são ilustradas as cargas experimentadas por um veículo durante um teste de condução. Durante a fase de replicação, as cargas na estrada são quase perfeitamente correspondentes, devido ao fato de o veículo estar sendo operado exatamente da mesma maneira que durante o teste de condução.
A velocidade do veículo é reproduzida usando o dinamômetro de chassis operando em modo de controle de velocidade (ASR). Simultaneamente, os comandos do pedal e as mudanças de marcha são reproduzidos, ou sincronizados, por meio de um sistema de direção robótica instalado no veículo.
O resultado final é que a ação de controle de velocidade do dinamômetro de chassi equilibra a força de resistência do dinamômetro com o esforço de tração do veículo para atingir a velocidade desejada. A resistência (força) fornecida pelo dinamômetro é, portanto, igual à carga real da estrada.
O resultado dessa abordagem é uma representação altamente precisa da carga que o veículo experimentou durante o teste de condução. Essa força resistiva é registrada como uma carga de dinamômetro e adicionada aos dados do teste para que possa ser usada como uma entrada de referência para simular o mundo real (veja a próxima etapa).
O novo perfil de carga de torque do dinamômetro agora representa com alta precisão todas as cargas resistivas que o veículo experimentou durante o teste de condução original. Curvas, rajadas de vento, inclinações e resistência ao rolamento são levadas em consideração. É uma reprodução quase perfeita.
Essa abordagem rápida e fácil de correspondência de torque oferece diversas vantagens. A principal delas é a eliminação da necessidade de medir ou estimar a inclinação ou a carga do veículo na estrada. Não são necessárias informações sobre o veículo, como a resistência ao rolamento durante a desaceleração.
O resultado final é uma reprodução altamente precisa da carga na estrada que o veículo experimentou no teste de condução. Por extensão, a ECU é estimulada exatamente da mesma forma que durante o teste de condução, criando assim uma reprodução altamente precisa em laboratório. Esse torque do dinamômetro é adicionado ao arquivo de teste para ser usado na etapa de emulação.
O resultado final é uma reprodução altamente precisa da carga rodoviária que o veículo experimentou no teste de condução. Por extensão, a ECU é estimulada, exatamente da mesma forma que durante o teste de condução, criando assim uma replicação altamente precisa em laboratório. Esse torque do dinamômetro é adicionado ao arquivo de teste para ser usado na etapa de emulação.
exatamente da mesma forma que durante o teste de condução, criando assim uma replicação altamente precisa em laboratório. Esse torque do dinamômetro é adicionado ao arquivo de teste para ser usado na etapa de emulação.
Na Figura 3, um veículo é conduzido em um dinamômetro de chassis, utilizando um robô para controlar o acelerador, o freio e as posições da marcha. O controlador do dinamômetro é programado para seguir a curva de velocidade com precisão, alterando o torque do dinamômetro. A curva de torque é então registrada em função do tempo para que possa ser utilizada na próxima etapa, a emulação.
Etapa 3: Emulação com o veículo original
Agora que o arquivo de teste de replicação possui uma representação precisa das cargas na estrada, podemos usar quaisquer coeficientes de simulação de carga rodoviária (RLS) razoáveis para A, B, C e massa para derivar um canal de gradiente. Ao contrário do método RLS, os coeficientes do veículo podem ser quaisquer valores dentro de um limite razoável. Por exemplo, os coeficientes aproximados de desaceleração por inércia podem ser valores genéricos, escolhidos de uma tabela de resistências ao rolamento (padrão) ou gerados por uma fórmula/calculadora.
O método de correspondência de torque HORIBA não precisa medir coeficientes relacionados às forças de resistência. Isso resulta em uma precisão de replicação muito maior.
O software R2R Torque Matching utiliza o registro de velocidade para calcular uma carga teórica na estrada, usando o modelo RLS (A, B, C + Massa, inserida pelo usuário). Esse valor é subtraído da carga real na estrada, obtida na etapa de replicação (etapa 2 acima). A diferença entre a carga teórica e a real é então registrada e definida como um perfil de gradiente de entrada.
Em essência, o termo de gradiente funciona como uma espécie de "compensação" para capturar a diferença entre o modelo e o mundo real. Portanto, se forem escolhidos termos A, B e C leves, os valores do gradiente serão maiores do que se fossem escolhidos termos pesados.
A chave é usar os mesmos termos no sistema de automação do dinamômetro que foram usados para o cálculo. Para ficar claro, isso significa realizar uma correspondência de desaceleração no dinamômetro de chassi usando os mesmos coeficientes do veículo que o alvo de desaceleração.
O efeito líquido de percorrer a mesma trajetória de velocidade do veículo, com os mesmos termos A, B e C usados no cálculo, mais os valores de inclinação calculados, é que a mesma carga da estrada é experimentada pelo veículo como no teste de estrada.
 Uma diferença fundamental na fase de emulação é que o controle do veículo retorna ao robô condutor. Agora, ele deve usar o controle em malha fechada dos pedais e da transmissão para atingir a velocidade desejada, em vez de deixar que o dinamômetro do chassi se adapte para alcançar essa velocidade.
Uma diferença fundamental na fase de emulação é que o controle do veículo retorna ao robô condutor. Agora, ele deve usar o controle em malha fechada dos pedais e da transmissão para atingir a velocidade desejada, em vez de deixar que o dinamômetro do chassi se adapte para alcançar essa velocidade.
A vantagem disso é que agora é possível alterar os atributos do veículo e ainda assim dirigir sobre o mesmo 'perfil de carga'. O resultado é uma emulação robusta e repetível do mundo real.
As equipes de desenvolvimento, qualidade e conformidade da produção podem ter certeza de que o laboratório de testes preverá com precisão os resultados no mundo real para quaisquer alterações nas calibrações, componentes ou estilos de condução.
Uma diferença fundamental na fase de emulação é que o controle do veículo retorna ao robô condutor. Agora, ele deve usar o controle em malha fechada dos pedais e da transmissão para atingir a velocidade desejada, em vez de deixar que o dinamômetro do chassi se adapte para alcançar essa velocidade.
A vantagem disso é que agora é possível alterar os atributos do veículo e ainda assim dirigir sobre o mesmo 'perfil de carga'. O resultado é uma emulação robusta e repetível do mundo real.
As equipes de desenvolvimento, qualidade e conformidade da produção podem ter certeza de que o laboratório de testes preverá com precisão os resultados no mundo real para quaisquer alterações nas calibrações, componentes ou estilos de condução.
Etapa 4: Simulação com um veículo diferente
Outro benefício da nossa abordagem de Correspondência de Torque é a capacidade de trocar de veículo e reutilizar os mesmos dados e configurações de teste. O torque correspondente permite que qualquer veículo de tamanho similar utilize os resultados registrados e ainda produza resultados altamente precisos.
Isso torna fácil e conveniente substituir o veículo original por um modelo similar sem a necessidade de definir uma linha de base para o novo veículo.
A maioria dos dinamômetros modernos e seus sistemas de automação podem simular a carga em estrada (RLS) de um veículo ou sistema. Essa é uma prática comum. No entanto, a precisão não é tão boa quanto poderia ser devido a vários motivos.
Primeiro, a equação RLS é uma simplificação excessiva da dinâmica real que rege o movimento de um veículo. Segundo, o próprio método de derivação dos coeficientes apresenta imprecisões, como as medições de desaceleração. Por fim, a resposta do sistema contribui para a imprecisão, uma vez que as posições do acelerador e do freio não são replicadas com perfeição.
A geração dos coeficientes RLS necessários também exige recursos e tempo consideráveis. O acesso a veículos, mão de obra e instalações de teste é necessário para cada modelo de veículo.
Os resultados na figura abaixo mostram que o método de Correspondência de Torque, também conhecido como replicação de carga rodoviária (RLR), possui um nível de precisão muito maior. Isso ocorre fundamentalmente porque o veículo em teste é estimulado exatamente da mesma maneira que durante o teste de condução original. A precisão e a simplicidade superiores do método de Correspondência de Torque HORIBA também podem ser aplicadas a veículos elétricos a bateria (BEVs).
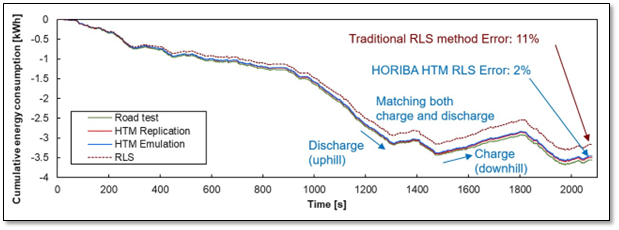
Previsão de consumo de energia de veículos elétricos a bateria
O mesmo se aplica à simulação de um BEV em um dinamômetro de chassis. O método Torque Matching da HORIBA proporciona uma simulação muito mais precisa do consumo de energia. Abaixo, encontra-se um gráfico que compara a simulação do consumo cumulativo de energia de um veículo elétrico utilizando os métodos tradicionais RLS e Torque Matching RLS (RLR) da HORIBA.
A tabela apresenta dados comparativos entre a metodologia de Correspondência de Torque (RLR) e a simulação tradicional de carga rodoviária (RLS).
Note-se que todos estes resultados foram obtidos utilizando o mesmo veículo e com um robô condutor ADS-EVO a controlar os comandos do veículo.
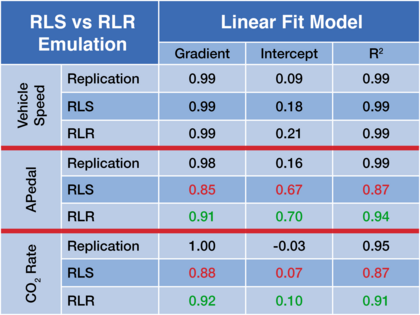
Nesta tabela:
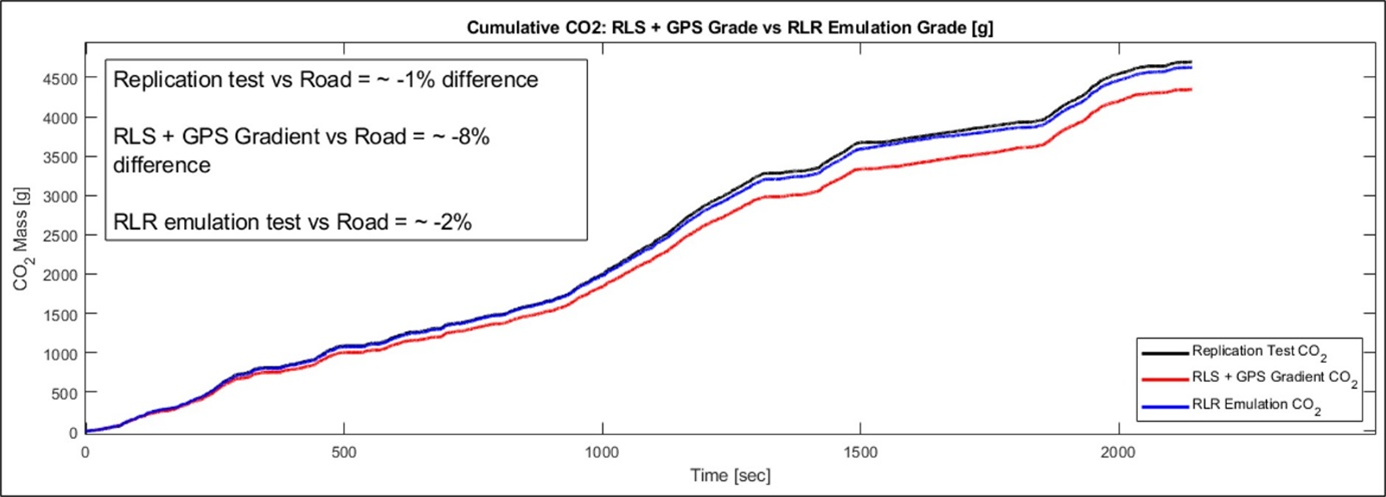
Os resultados mostram que nosso método de Correspondência de Torque, aqui identificado como RLR, produz uma replicação muito mais precisa da velocidade do veículo, do pedal do acelerador e do CO2 quando comparado com uma abordagem RLS tradicional. Comparações de outras emissões também podem ser fornecidas mediante solicitação.
Os dinamômetros de chassi estão se tornando um recurso fundamental para o desenvolvimento.
O dinamômetro de chassis está prestes a se tornar uma das ferramentas mais importantes no conjunto de ferramentas de um fabricante de equipamentos originais (OEM) ou fornecedor. O VULCAN Evo, equipado com a mais recente tecnologia de automação, como STARS, pode reduzir drasticamente o esforço e os recursos necessários para a homologação de veículos, empregando técnicas de desenvolvimento mais inteligentes.
Testes completos e autônomos em dinamômetro de chassi
A combinação de um dinamômetro de chassis com sistemas avançados de automação e segurança, um robô de condução, um sistema de replicação ambiental como MEDAS e o ajuste de torque permite a operação autônoma 24 horas por dia, 7 dias por semana, durante semanas ou até meses. Os veículos elétricos podem ser recarregados, resfriados e aquecidos à força, além de terem sua ECU reprogramada automaticamente após cada teste. Esse alto nível de automação abre novas possibilidades de teste e desenvolvimento.
Veículo no circuito
Uma célula de teste de chassis avançada permite a execução de testes com o veículo em circuito fechado, verificando e validando funcionalidades iniciais diretamente do ambiente de simulação. Essa estreita integração com a simulação transforma o laboratório de chassis em uma extensão do mundo virtual. Por exemplo, os recursos ADAS podem ser testados em uma ampla gama de situações antes que um veículo seja liberado para circulação em vias públicas. Possuímos um conjunto de ferramentas para teste de sensores CAV que complementa uma célula de teste de chassis já existente.
Nossa solução R2R foi projetada para ser facilmente implementada em laboratórios de teste existentes. Os recursos de replicação e emulação de correspondência de torque são habilitados por meio de softwares chamados Data Builder, Test Builder e Chart Builder. Essas ferramentas formatam os dados e os convertem para que um sistema de automação de testes possa lê-los e executar os testes. Elas estão disponíveis como aplicativos de software que são executados no ambiente STARS Enterprise, seja na nuvem ou em um computador local.
A solução pode funcionar com sistemas de automação, dinamômetros e robôs de acionamento que não sejam HORIBA.
Equipamentos e softwares necessários:
Utilização eficiente dos recursos de teste, resultando em benefícios operacionais e de custo.
Vantagens para o desenvolvimento das emissões
Requisito reduzido para testes ambientais em campo.
Redução da necessidade de medições pré-teste para os coeficientes RLS
Não há necessidade de calcular previamente os coeficientes de um veículo usando medições como resistência ao rolamento, arrasto aerodinâmico ou torque no eixo. Também não é preciso gastar tempo determinando a inclinação da estrada, seja por meio de medição ou aproximação.
Isso representa uma enorme economia para OEMs e fornecedores. Medições adicionais como as mencionadas acima podem consumir muitos recursos e tempo. Como explicaremos adiante, a abordagem de Correspondência de Torque da HORIBA proporciona maior precisão devido à eliminação das tolerâncias de medição.
Avaliação comparativa mais rápida de células de teste
Utilize um veículo de referência e a maior precisão da correspondência de torque para verificar se os laboratórios de teste em dinamômetro estão alinhados e dentro das tolerâncias aceitáveis.
Desenvolvimento de sistemas veiculares eficientes
Investigar rapidamente alterações de design, tais como:
Os efeitos ambientais podem ser explorados de forma rápida e repetível.
A altitude ou a temperatura podem ser alteradas para destacar problemas e validar correções.
O conjunto motopropulsor, o chassi e os sistemas de assistência podem ser otimizados considerando que o veículo está sendo carregado da mesma forma que na estrada.
Simule testes de condução virtuais usando o sistema "veículo em circuito fechado" e a correspondência de torque.
Importe o gradiente real para a rota de teste virtual (por exemplo, através de um software como o IPG CarMaker Vehicle Simulation) para simulação e teste de veículo em circuito fechado.
O método "da estrada para o equipamento" é uma abordagem cada vez mais popular para trazer testes do mundo real para o laboratório. Nosso método patenteado de correspondência de torque é uma técnica simples, porém altamente precisa, que pode ser implementada em instalações de teste existentes. Ele apresenta um desempenho de replicação superior ao método RLS tradicional, exigindo menos medições iniciais para a criação dos coeficientes de simulação de carga rodoviária.
Preencha o formulário abaixo para agendar uma demonstração de correspondência de torque.


Você tem alguma dúvida ou solicitação? Utilize este formulário para entrar em contato com nossos especialistas.